
Events

Prof. Koushil Sreenath (UC Berkeley)
Safety, Representations, and Generative Learning for Dynamical Systems
The seminar is open to Stanford faculty, students, and sponsors.

Prof. Madhur Behl (University of Virginia)
Bringing AI Up To Speed
The seminar is open to Stanford faculty, students, and sponsors.
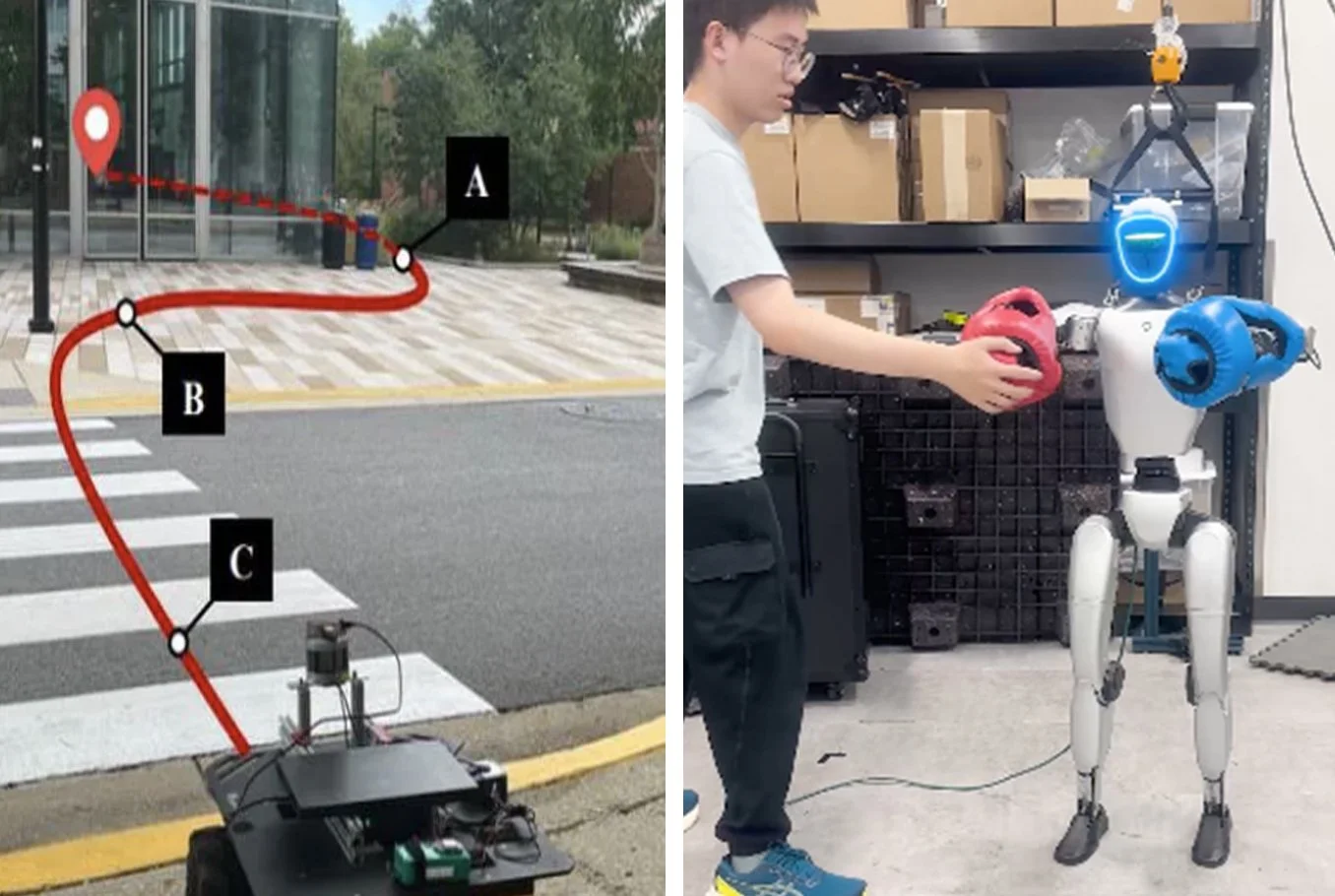
Autonomous Navigation in Complex Outdoor Environments: Towards Companion Robots for Longevity | From Digital Humans to Safe Humanoids: Grounded Reasoning and Compliant Interaction
Student Speakers: Jing Liang & Yao Feng
The seminar is open to Stanford faculty, students, and sponsors.

Prof. Sebastian Scherer (CMU)
Resilient Autonomy for Extreme and Uncertain Environments
The seminar is open to Stanford faculty, students, and sponsors.

Prof. Ahmed. H. Qureshi (Purdue)
Robot Motion Learning with Physics-Based PDE Priors
The seminar is open to Stanford faculty, students, and sponsors.

Prof. Nadia Figueroa (UPenn)
“Motion Ready” Dynamic Conductors for the Future of Robotics
The seminar is open to Stanford faculty, students, and sponsors.

Prof. Monroe Kennedy (Stanford)
“Motion Ready” Dynamic Conductors for the Future of Robotics
The seminar is open to Stanford faculty, students, and sponsors.

Maeden Demo / Meet & Greet
“Motion Ready” Dynamic Conductors for the Future of Robotics
The seminar is open to Stanford faculty, students, and sponsors.

Stanford Biodesign Presents Gary Guthart, PhD
A health technology leader’s relentless focus on solving healthcare’s big problems
The seminar is open to Stanford faculty, students, and sponsors.

Steve Cousins: Reflections on Advancements in Robotics
Steve Cousins @ Entrepreneurial Thought Leaders Speaker Series (ETL)
The seminar is open to everyone.
Yuke Zhu: Toward Generalist Humanoid Robots - Recent Advances, Opportunities, and Challenges
The seminar is open to Stanford faculty, students, and sponsors.
Cynthia Sung: Leveraging Environmental Interactions for Robot Design and Control
Stanford Robotics Center Special Seminar
The seminar is open to Stanford faculty, students, and sponsors.

Ashutosh Saxena on the Graph Physical AI Approach: Bridging Physics and Data for Scalable Robotics
The seminar is open to Stanford faculty, students, and sponsors.

Student Speakers: Hojung Choi & Jonas Frey
The seminar is open to Stanford faculty, students, and sponsors.

Prof. Nick Gravish (UCSD): Adaptive Robots
Prof. Nick Gravish (UCSD): Adaptive robots through reconfiguration, compliance, and contact
The seminar is open to everyone.

H. Harry Asada (MIT): Human-Inspired Robotics
Human-Inspired Robotics and Robotics-Informed Human Studies: From SuperLimbs to Koopman Operator Theory
The seminar is open to Stanford faculty, students, and sponsors.

Robotics Seminar: Prof. Simone Schürle‑Finke (ETH)
Design, Synthesis, Control, and Tracking of Soft Magnetic Microrobots for Targeted Therapeutic Delivery
The seminar is open to Stanford faculty, students, and sponsors.

PhD Defense Announcement: Fadhil Ginting
Reasoning and Planning using Contextual Semantics in Unstructured Environments
Robotics Seminar: Prof. Yang Gao (THU)
Manipulation Data Pyramid: From Human Video Pretraining to Physical RL
The seminar is open to Stanford faculty, students, and sponsors.
Robotics Seminar: Feifei Qian (USC)
Make Every Step an Experiment: Towards Terrain-aware, High-mobility Robots for Planetary Explorations
The seminar is open to Stanford faculty, students, and sponsors.

20 Years Building Character Robots: Risk, Grit, and Real-World Impact
Come meet Jérôme Monceaux, the visionary behind Nao and Pepper, two of the most iconic humanoid robots in the world. Today, he’s building the next generation of social robots at Enchanted Tools, with a radically different approach to design, mobility and user interaction. Live on-stage demo included.
RSVP required by Monday, June 23. The presentation is open to everyone.

Dane Brouwer PhD Defense: "Embodied, Reflexive, and Multimodal Intelligence for Manipulation in Unstructured Environments"
In this talk, I will discuss 3 projects which enable robots to manage unstructured environments by using embodied, reflexive, and multimodal strategies.
The seminar is open to everyone.

Cartography to shape morphing at many length scales
“Soft robots locomote by reshaping compliant bodies. However, precision control of large, reversible 3-D deformations with minimal hardware remains difficult. We tackle this by treating morphing as a geometric problem: prescribing an in-plane “metric actuation” field—coordinated local area expansions and contractions—changes a surface’s intrinsic curvature, causing a flat surface to autonomously adopt a prescribed 3-D form.”
The seminar is open to Stanford faculty, students, and sponsors.

Won Kyung Do PhD Defense: "Improving Robotic Dexterity with Optical Tactile Sensor DenseTact"
Dexterous manipulation - especially when objects are small, cluttered, or partially occluded - remains a complex challenge in robotics. In this talk, I present three approaches to tackling this problem using DenseTact, a family of soft, vision‑based tactile sensors.
The seminar is open to everyone.

“Robot Learning Without Action Chunking” & “Generalization through Task Representations with Foundation Models”
Student Speakers - Yuejiang Liu & Wenlong Huang, "Robot Learning Without Action Chunking” & “Generalization through Task Representations with Foundation Models”
The seminar is open to Stanford students, staff, and affiliates.

AXIS Dance Company and Dr. Catie Cuan: Robotics Showcase
Manifold is a project by choreographer, dancer, and roboticist Dr. Catie Cuan. This work delves into human/robot interaction, bringing to life the concept of connection and empathy between humans and machines. Catie is an active member of and contributor to the SRC Team.

Robotics Entrepreneurship: Robotics from Sim to Scale: Challenges in Data & Go-to-Market
Panel discussion on how robotics ventures bridge the gap from simulation prototypes to scalable production and tackle the Go-to-market challenges.

What Brains Forgot, Bodies Remember: Building Intelligence from the Ground Up
“Intelligence does not emerge fully formed, but it forms from a developmental cycle.” In this talk, Prof. Boyuan Chen presents a developmental arc of embodied intelligence centered on three interdependent capacities: Sense, Adapt, and Connect.
The seminar is open to Stanford faculty, students, and sponsors.

Learning to Control Large Teams of Robots
Prof. Eduardo Montijano ( Universidad de Zaragoza) speaks about the topic of controlling large teams of robots is a crucial challenge in robotics, due to the need for solutions that balance efficiency, scalability, and robustness.

Hardware / controls co-design to overcome challenges for aerial robots
Mark Mueller of UC Berkeley presents a seminar entitlted “Hardware / controls co-design to overcome challenges for aerial robots.” This seminar is open to Stanford faculty, students, and sponsors.
Come meet Jérôme Monceaux, the visionary behind Nao and Pepper, two of the most iconic humanoid robots in the world. Today, he’s building the next generation of social robots at Enchanted Tools, with a radically different approach to design, mobility and user interaction. Live on-stage demo included.
RSVP required by Monday, June 23. The presentation is open to everyone.